Unity_Lesson
模倣学習
「模倣学習」は、教師となる人間の一連の行動(「デモ」と呼びます)を模倣することで、タスクを攻略する学習法です。報酬を得ることが難しいゲームでも、人間の行動を模倣することで、学習を早く進めることができます。
模倣学習の学習環境の準備
「4-6 Curiosity」で作成した学習環境で「模倣学習」を学習します
デモの記録
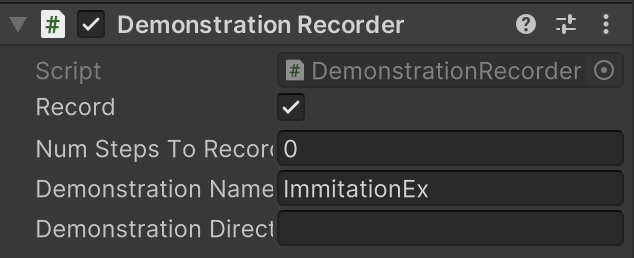
①エージェントに「DemonstrationRecorder」
RecordをチェックしてUnityエディタを実行すると、「Demonstration Directory」でデモの保存先を指定できます。デフォルトでは「Assets/Demonstrations/」
| 項目 | 説明 |
|---|---|
| Record | デモファイルを保存するかどうか |
| Num Steps To Record | 記録するステップ数(0は無制限) |
| Demonstration Name | デモファイル名 |
| Demonstration Directory | デモファイルを保存するフォルダ(デフォルトは「Demonstrations/」) |
②「Unityエディタ」上で、ヒューリスティックモードで実行
「Behavior Parameters」にモデルが指定されている場合は、「Behavior Type」に「Heuristic Only」を指定してください。
③キー操作で5周回った後、Stopボタンで終了
「Assets/Demonstrations」に「ImitationEx.demo」が生成されています
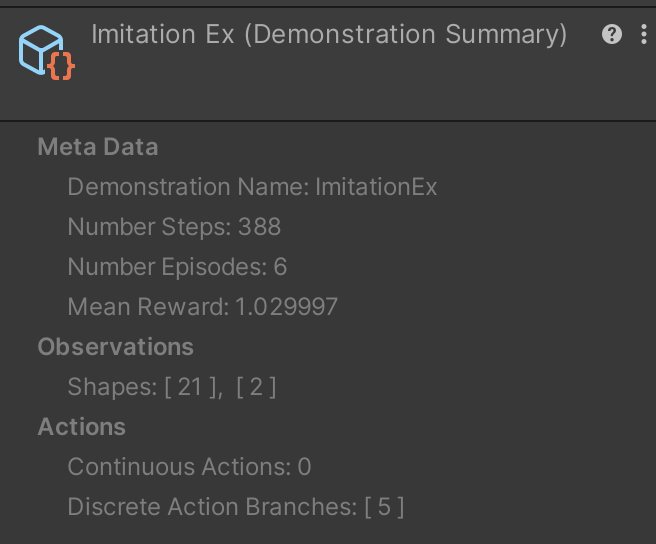
④ProjectWindowで「ImitationEx.demo」を選択
Inspector Windowsにでもファイルの情報が表示されます。
模倣学習の学習設定ファイルの設定
今回は「PPO」で学習します。以下のように、ハイパーパラメータを設定
behaviors:
ImitationEx:
trainer_type: ppo
max_steps: 10000000
time_horizon: 128
summary_freq: 10000
keep_checkpoints: 5
hyperparameters:
batch_size: 128
buffer_size: 2048
learning_rate: 0.0003
learning_rate_schedule: linear
beta: 0.01
epsilon: 0.2
lambd: 0.95
num_epoch: 3
network_settings:
normalize: false
hidden_units: 512
num_layers: 2
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
curiosity:
gamma: 0.99
strength: 0.005
network_settings:
hidden_units: 64
learning_rate: 0.0003
gail:
gamma: 0.99
strength: 0.005
network_settings:
hidden_units: 64
learning_rate: 0.0003
use_actions: false
use_vail: false
demo_path: ./config/sample/ImitationEx.demo
behavioral_cloning:
demo_path: ./config/sample/ImitationEx.demo
steps: 10000
strength: 0.5
samples_per_update: 0
BCのハイパーパラメータ
「behavioral_cloning:」に、BCのパラメータを設定します
demo_path
demoファイルのパス
strength
PPOの学習に対する模倣学習の影響度(デフォルト:1.0)
・典型的な値:0.1 ~ 0.5
steps
模倣学習のステップ数(デフォルト:0)。
0は無期限。
「BC」では、エージェントが報酬を発見した後、デモの使用を停止することが望ましい場合がよくあります。停止した後、強化学習で最適化することもできます。学習全体に渡って模倣学習を行うには、ステップを「0」に設定します
batch_size
模倣学習のバッチサイズ(デフォルト:「hyperparameters」のbatch_size)
・典型的な値:Continuous:512 ~ 5120
・典型的な値:Discrete:32 ~ 512
num_epoch
模倣学習のポリシー更新時の学習回数(デフォルト:「hyperparameters」のnum_epoch)。
・典型的な値:3 ~10
samples_per_update
模倣学習のポリシー更新前に収集する経験数(デフォルト:0)。0はステップ毎。
デモのデータセットが非常に大きい場合は、ポリシーの過剰適合を避けるために、これを下げることができます。「0」に設定すると、各更新ステップで全てのデモを利用します
・典型的な値:buffer_size
GAIL(模倣)報酬のハイパーパラメータ
「reward_signals:」下の「gail:」下に、GAIL報酬のパラメータを設定します。
strength
環境報酬とのバランス調整のため、GAIL報酬に乗算する値(デフォルト:1.0)。デモが最適ではない場合は、この値を低く指定します。デモをコピーしたい場合は、大きな値を指定します。
・典型的な値:0.001 ~ 0.1
gamma
将来の報酬割引率(デフォルト:0.99)。将来の報酬を重視する場合は大きな値、即時報酬を終止する場合は小さな値にします。
・典型的な値:0.8 ~ 0.995
demo_path
demoファイルのパス
network_settings
GAILモデルのニューラルネットワークの設定。
設定項目は、「network_settings」と同様です。「hidden_units」は元の観測を圧縮するように十分に小さくする必要がありますが、期待される観察と実際の観察を区別できるだけの大きさ(64 ~ 256)が必要です。
learning_rate
GAILモデルの学習率(デフォルト:3e-4)。
学習が不安定で、GAILの損失が不安定な場合、これらを減らす必要があります。
・典型的な値:1e-5 ~ 1e-3
use_actions
Determineが観察と行動の両方と、観察のみの、どちらに基づいて区別するか(デフォルト:false)
エージェントにでもの行動を模倣させたい場合は、trueに設定します。falseに設定すると、デモが不完全な場合に安定する可能性が高くなりますが、学習速度が遅くなる可能性があります。
use_vail
Determineのvariational bottleneckの有効・無効(デフォルト:false)
これにより、Discriminatorはより一般的な表現を学習するようになり、識別が「あまりにも良い」傾向が減り、学習がより安定します。
ただし、学習時間は長くなります。模倣学習が不安定であるが、手元の課題を学習できない場合は、これを有効にします。
GANのGeneratorとDiscriminator
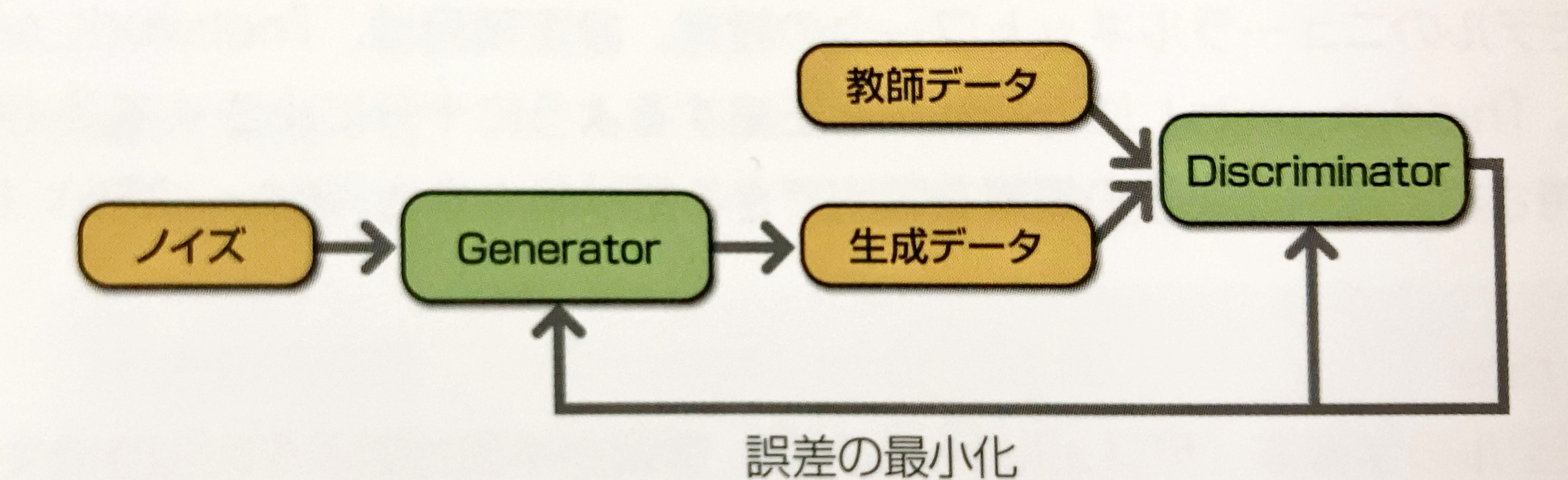
「GAIL」は、「GAN」(Generative Adversarial Network)の手法によって、模倣学習を行います。
模倣学習を簡単に説明すると、「人がやっていることを真似して学ぶ」方法です。
「GAN」では、「Generator(生成者・生成器)」と「Discriminator(判定者・識別器)」という2つのモデルを使います。
「Generator」は「教師データ」と似たデータを生成しようとします
「Discriminator」は「データ」が「教師データ」か「Generatorが生成したデータ」かを識別しようとします。
「Generator」と「Discriminator」の関係は、紙幣の偽造者と警察の関係によく例えられます。偽造者は本物の紙幣と似ている偽造紙幣を作ろうとし、警察は本物の紙幣と偽造紙幣を見分けようとします
模倣学習の実行
「模倣学習」を実行します。デモファイルは、学習設定ファイルで指定したパス(./config/sample/ImitationEx.demo)に配置してください
mlagents-learn .\config\sample\ImitationEx.yaml --run-id=ImitationEx-1 --env=ImitationEx-1 --num-envs=8
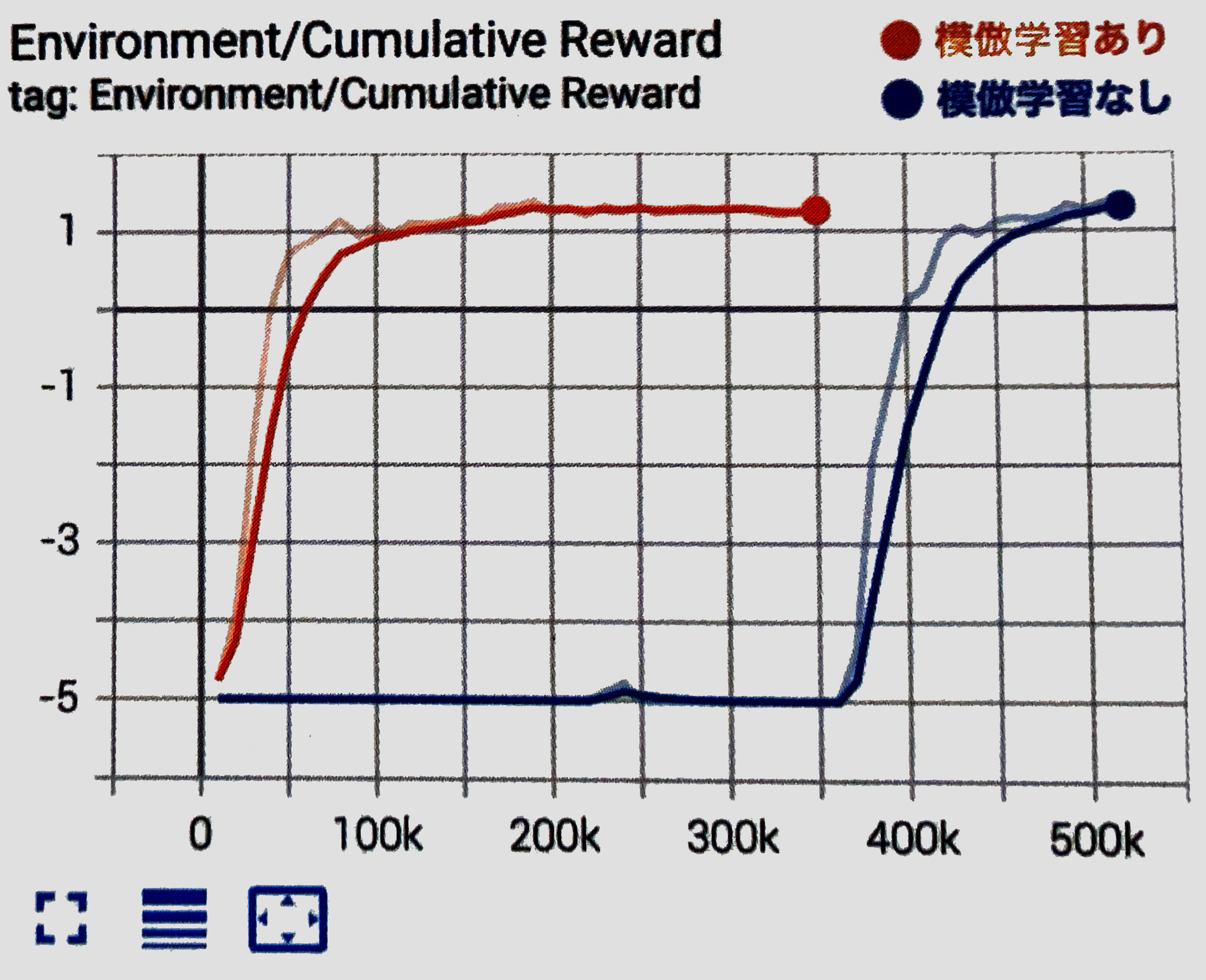
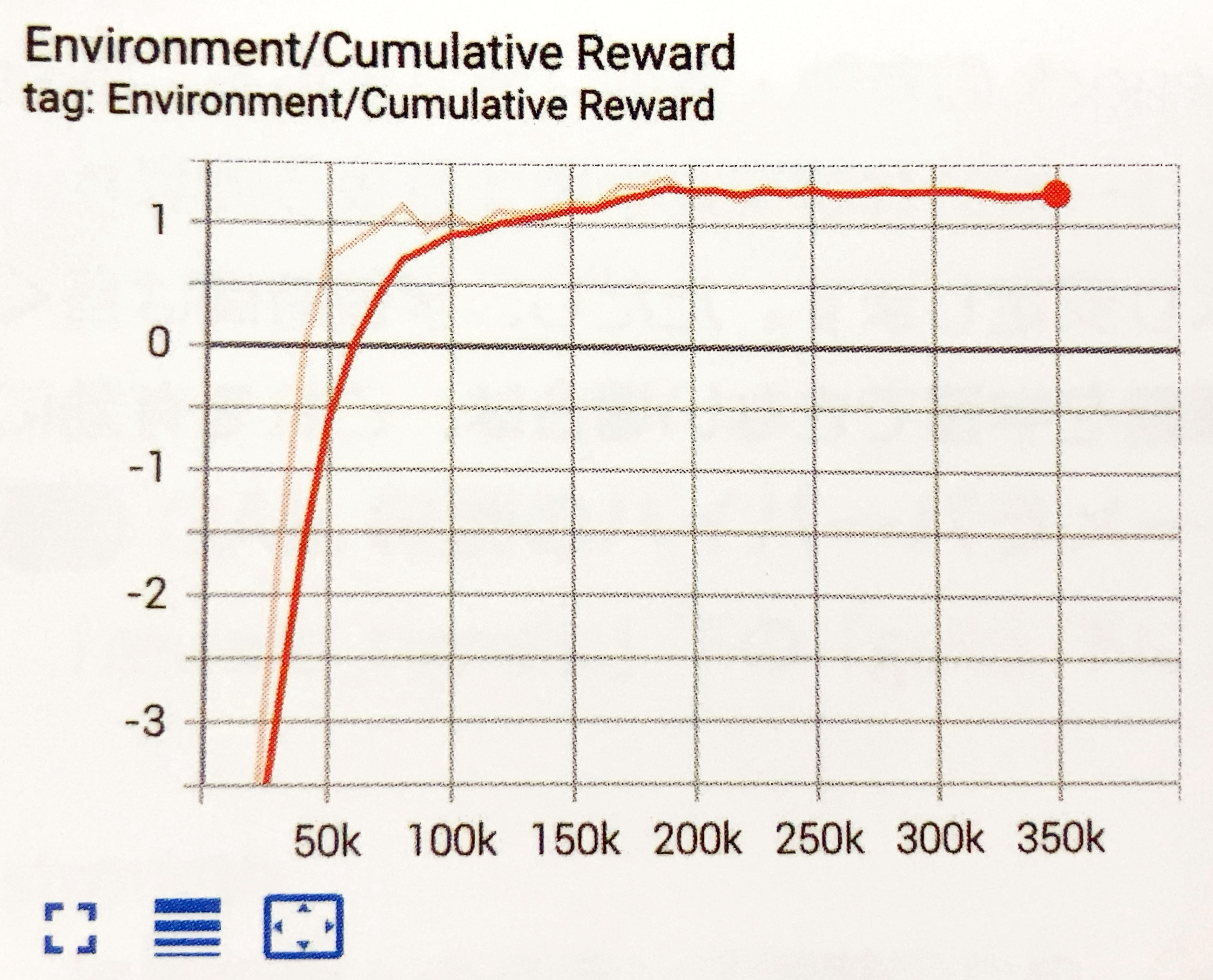
学習結果のグラフは、次のとおりです。
模倣学習専用のグラフ
模倣学習の使用時には、「TensorBoad」で模倣学習専用のグラフも提供されます。
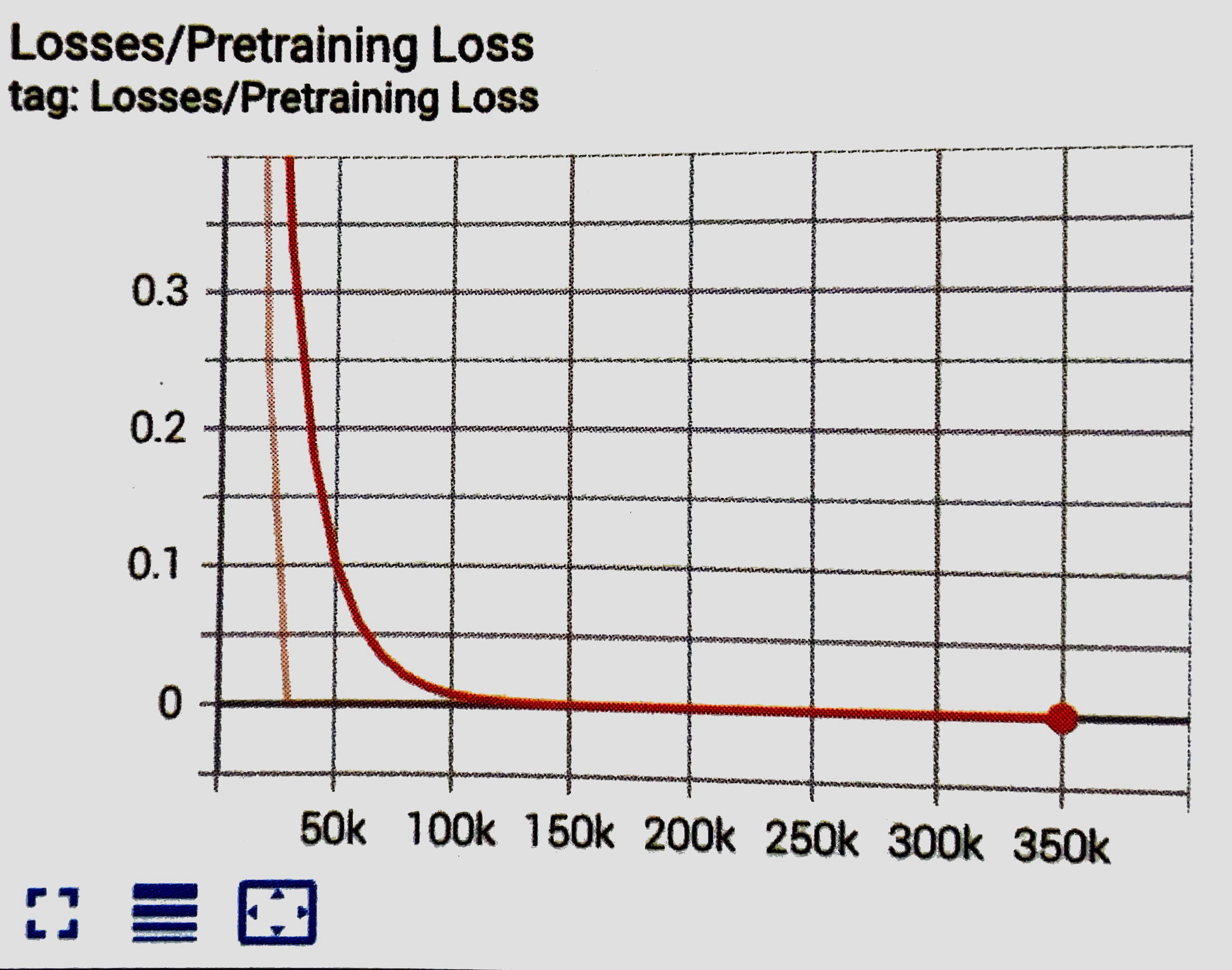
Pretraining Lossグラフ
「BC」の損失関数の平均を表すグラフです。モデルが新しい観察をどれだけうまく予測できるか示します。
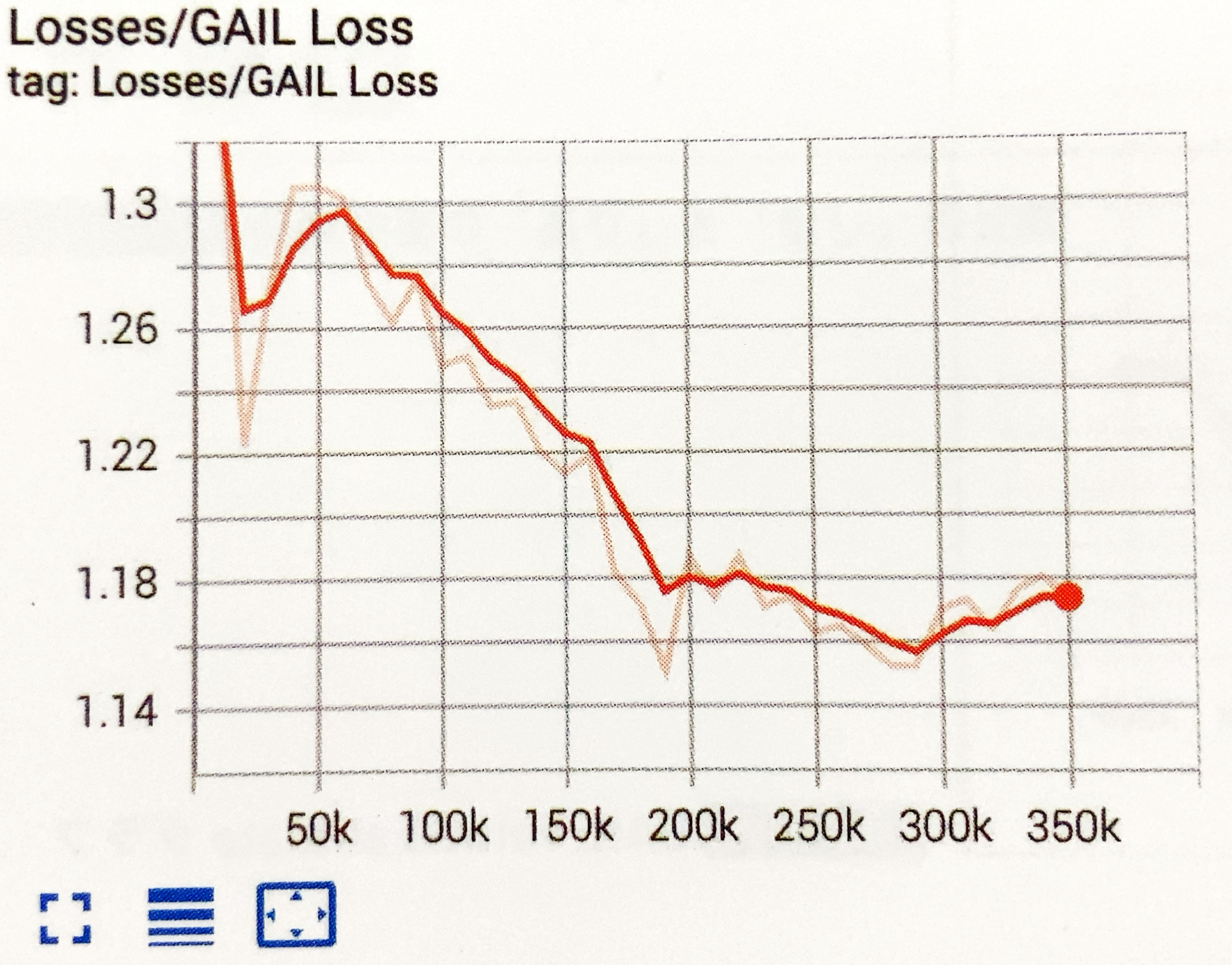
GAIL Lossグラフ
「GAIL」の損失学習の平均を表すグラフです。モデルが新しい観察をどれだけうまく予測できるか示します。
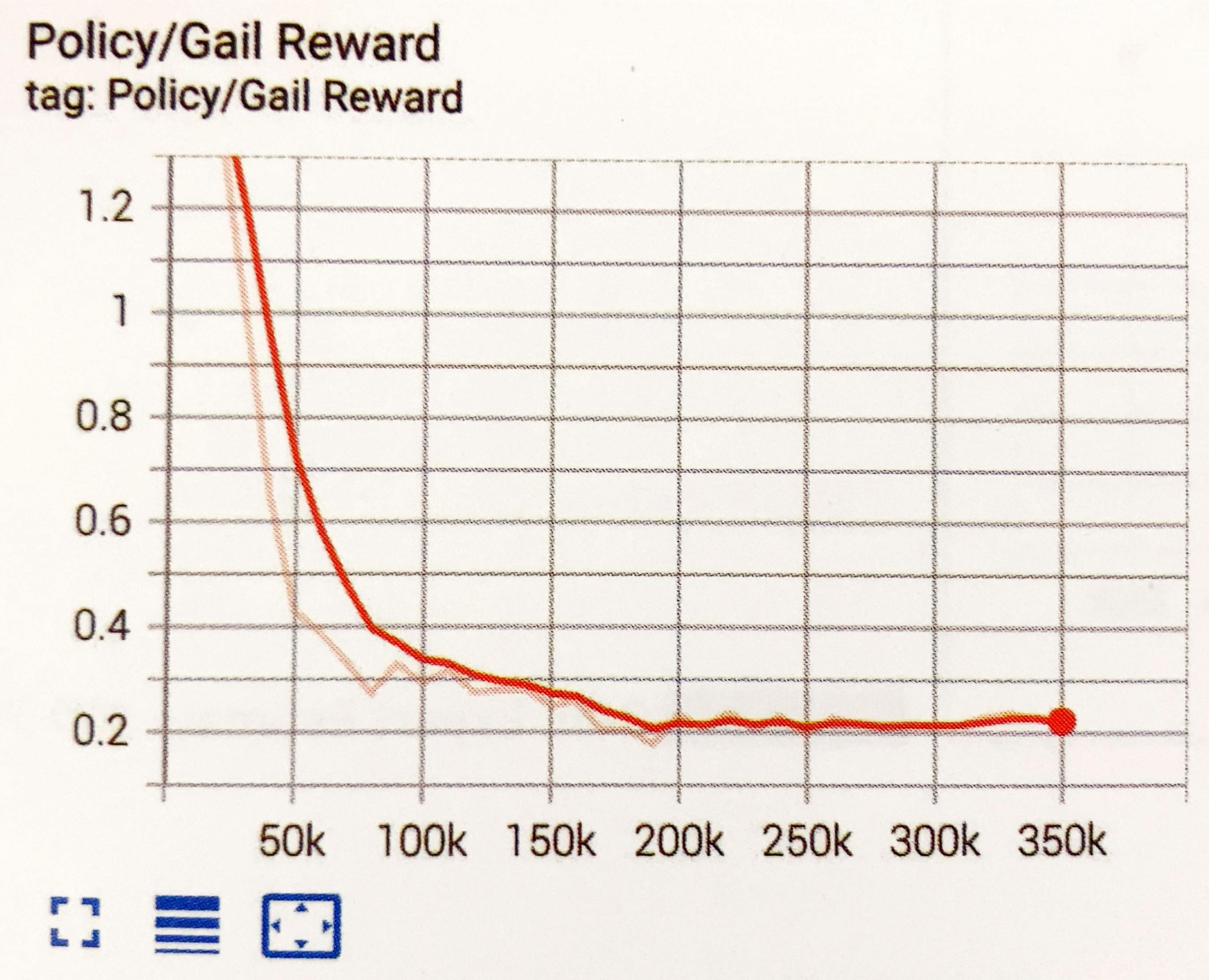
GAIL Rewardグラフ
報酬シグナル「GAIL」の平均累積エピソード報酬を表すグラフです。他の報酬シグナルとバランスを確認するために使います。
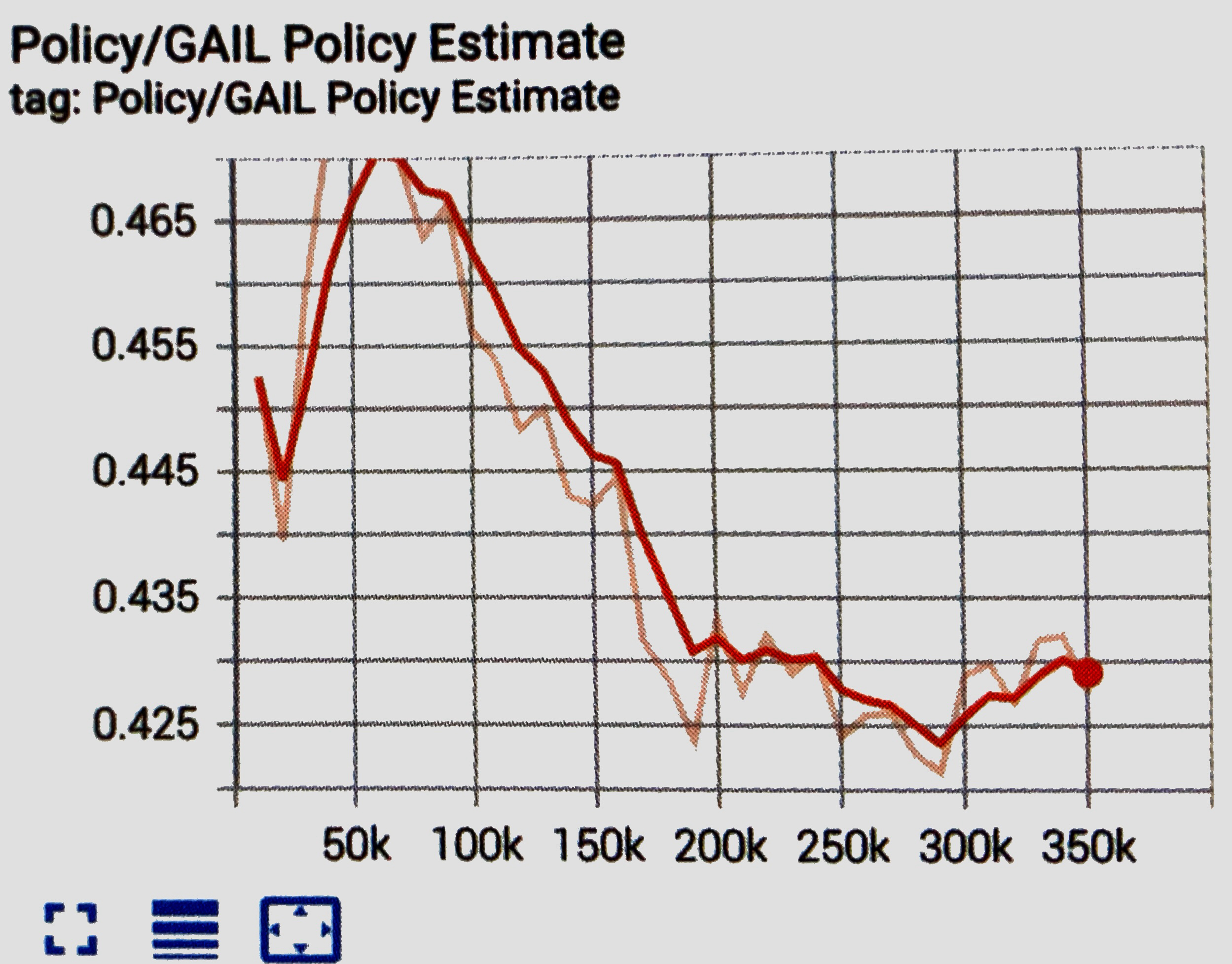
GAIL Policy Estimateグラフ
GAIL報酬に対するエージェントの価値の見積もりを表すグラフです。
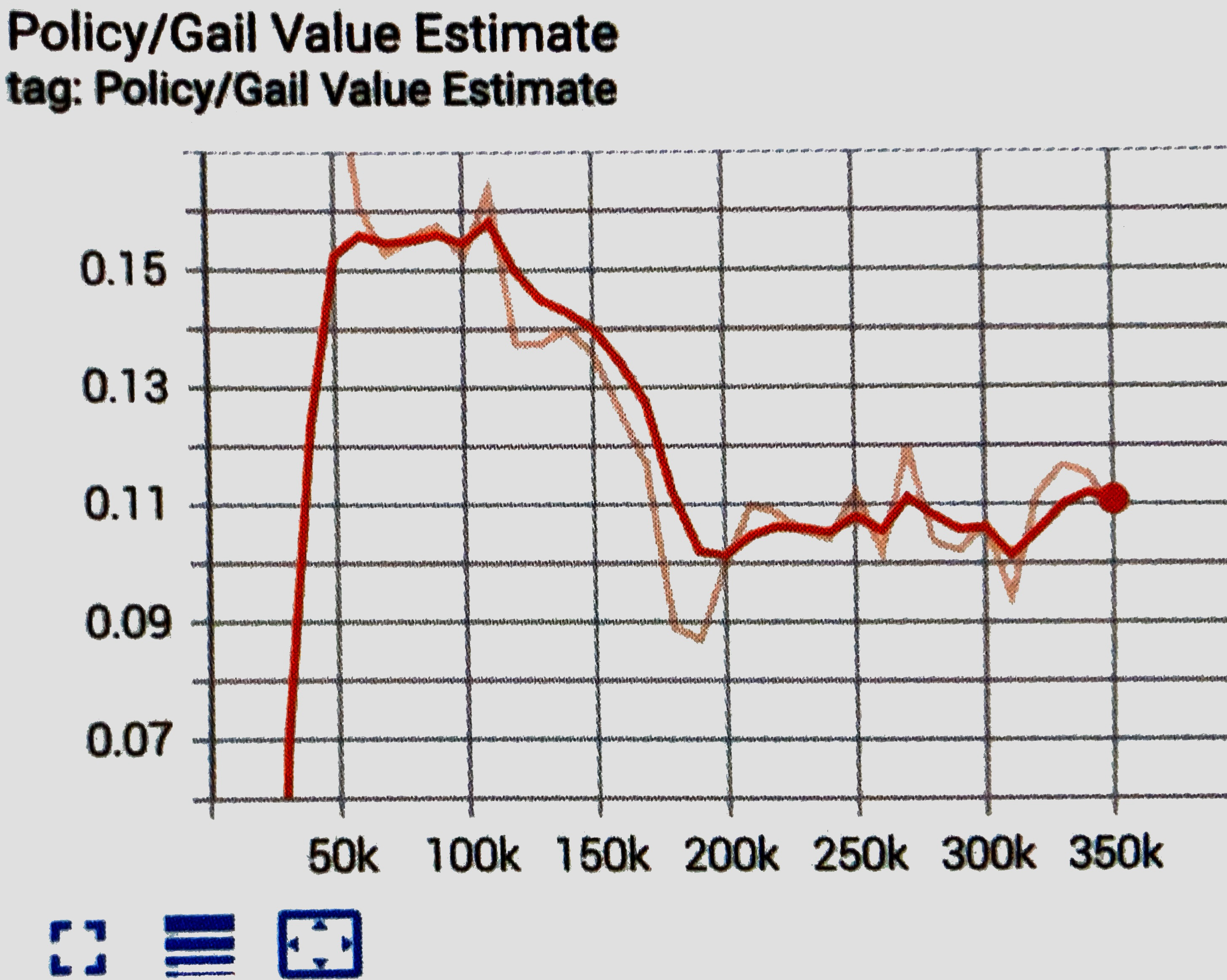
GAIL Value Estimateグラフ
ポリシーによって導き出された状態および行動に対するDiscriminatorの推定を表すグラフです
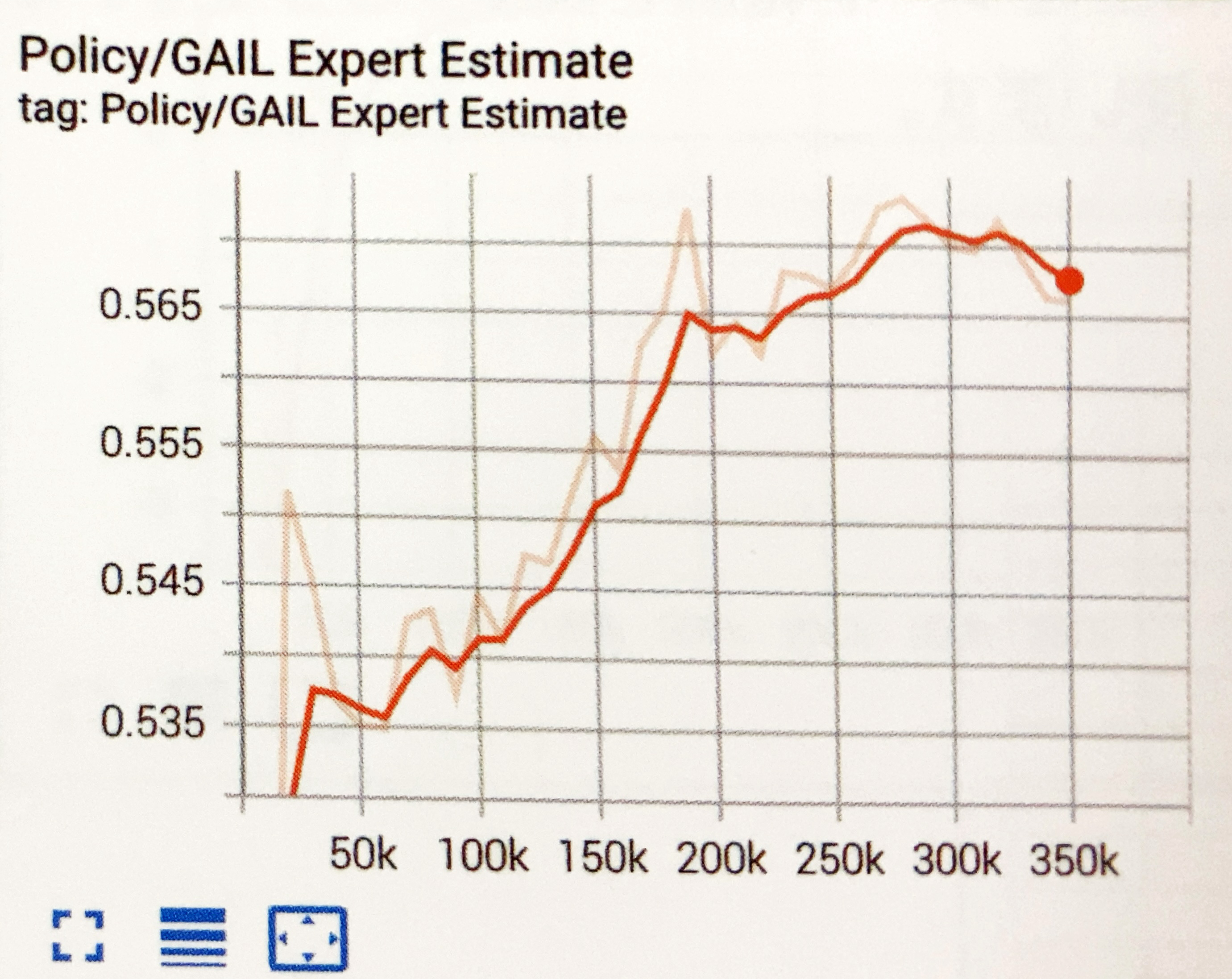
GAIL Expert Estimateグラフ
デモによって導き出された状態と行動のDiscriminatorの推定を表すグラフです。
模倣学習の「あり」と「なし」の比較
「模倣学習」の「あり」と「なし」を比較してみます。
デモがある分、模倣学習「あり」の方が早く報酬を見つけることができることがわかります。今回の環境では模倣学習「なし」でも、時間をかけることで見つけることができています。