Unity_Lesson
4-3 Visual Observation
「Visual Observation」は「カメラ」や「レンダーテクスチャー」の画像を「観察」として利用する学習環境です。
Visual Observationとは
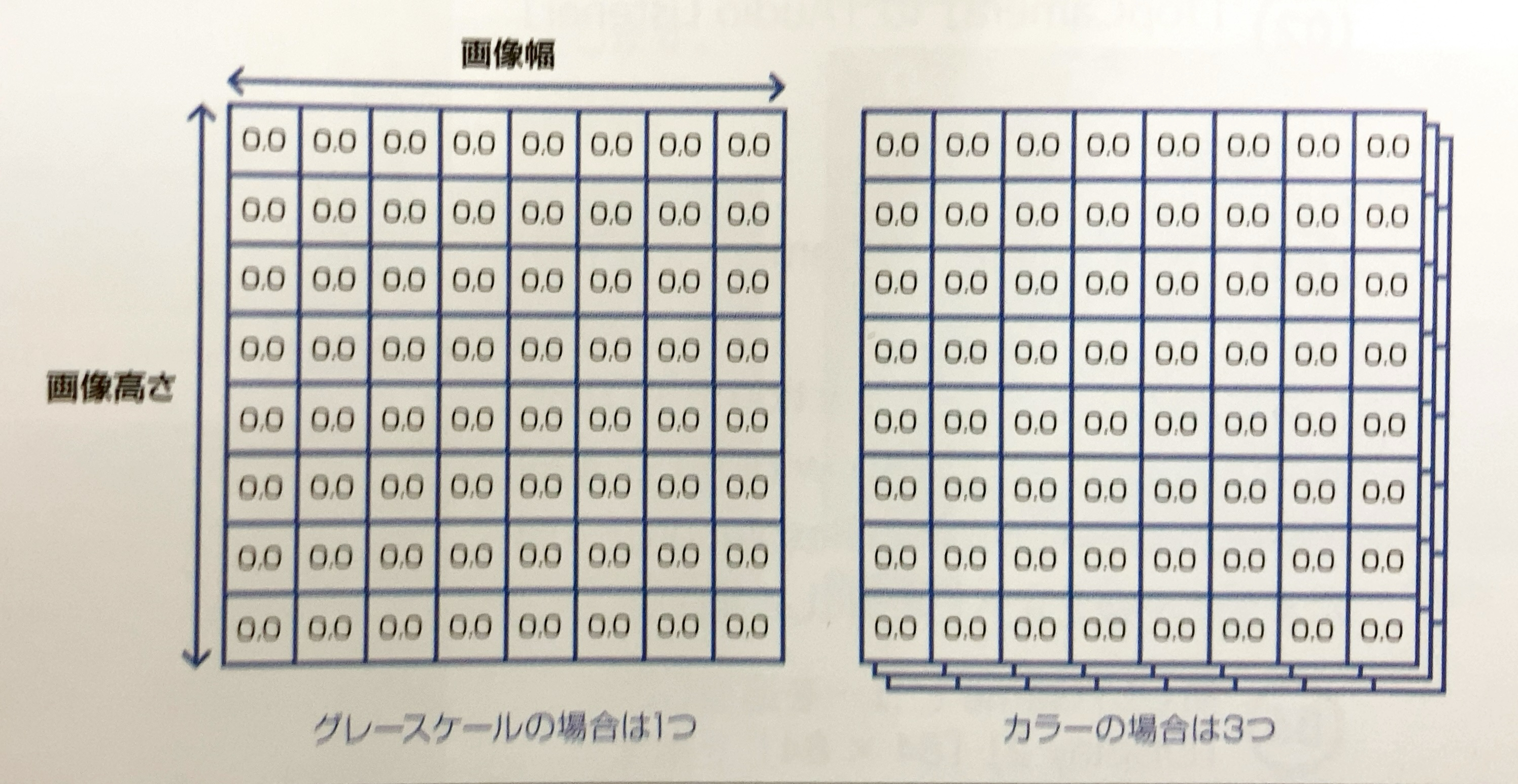
「Visual Observation」のデータ型を図で示すと、次のような「画像幅*画像高さ」の2次元配列になります。グレースケールの場合は1つ、カラーの場合はRGBの3つの2次元配列で表現します。
Visual Observationの実装手順
①「カメラ」または「レンダーテクスチャ」の準備
学習に利用する画像を撮影するカメラ、またはレンダーテクスチャを準備します。
②「Camera Sensor Coponent」または「Render Texture Sensor Component」の追加
「Camera Sensor Coponent」はカメラの画像、「Render Texture Sensor Component」はレンダーテクスチャの画像を観察として利用するためのコンポーネントです。
Visual Observationの学習環境の準備
すでに作成した学習環境「RollerBall」を「VisualObservation」にカスタマイズして学習します。(サンプル 4_3)
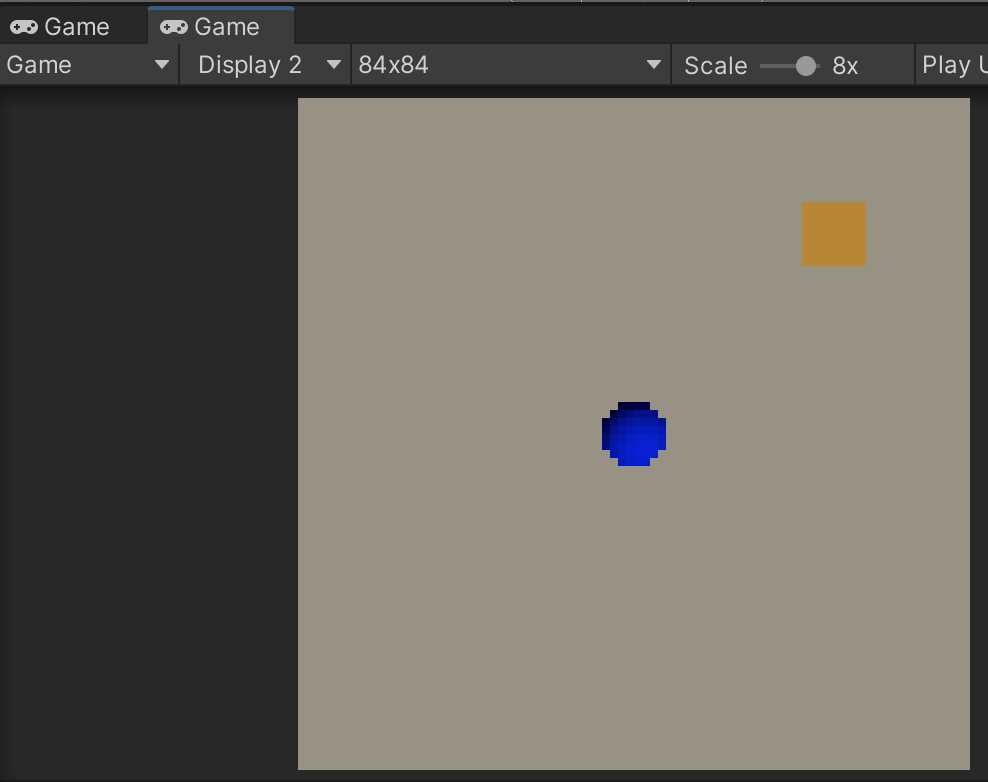
観察:VisualObservation(サイズ84✖︎84)
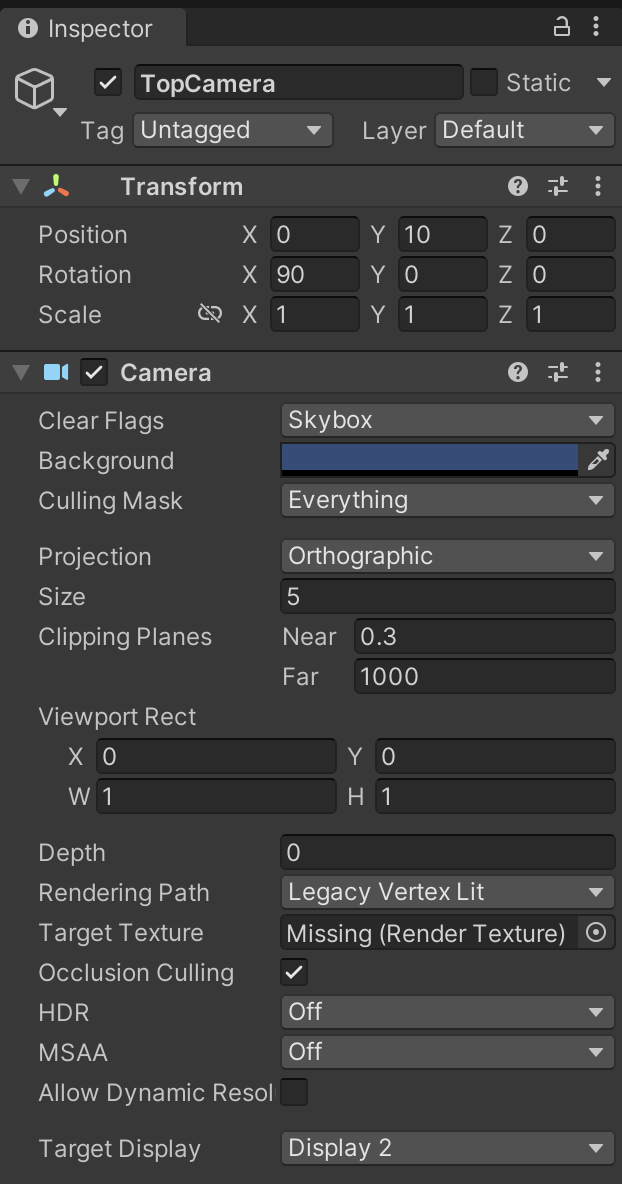
①新しいカメラ TopCamera を設定
②新しいGameビューを追加して「Display2」「84✖️84」を指定
③「BehaviorParameters」の設定
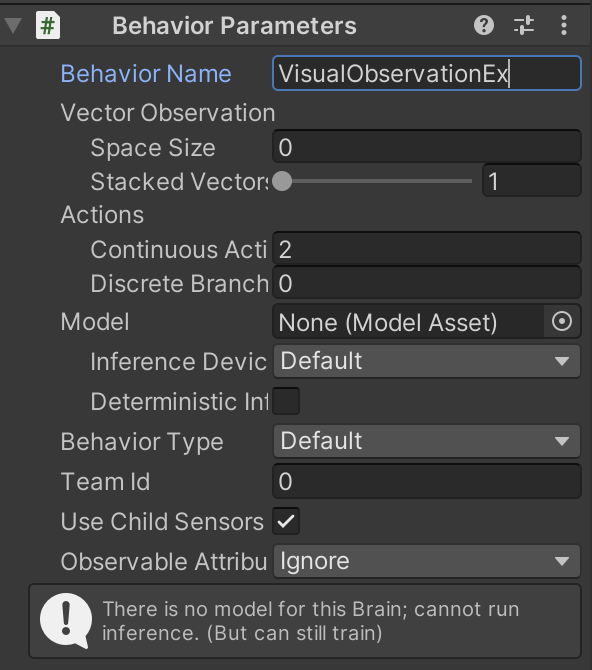
④「VectorObservation」は使わないので、「RollerAgent.cs」のCollectObservations()を削除
⑤エージェントに「Camera Sensor Component」を追加
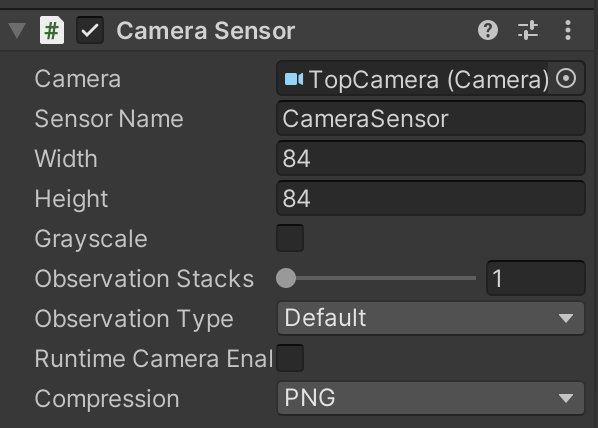
| 設定項目 | 説明 |
|---|---|
| Camera | 観察として利用するCameraオブジェクトの参照 |
| Sensor Name | センサー名 |
| Width | 画像の幅 |
| Height | 画像の高さ |
| Grayscale | グレースケールかどうか |
| ObsesrvationStacks | スタックして観察対象に含める過去の観察のステップ数 |
| ObsesrvationType | 観察種別() |
| Compressioin | 圧縮(None/PNG) |
Visual Observationの学習設定ファイルの設定
今回は「PPO」で学習します。
behaviors:
VisualObservationEx:
trainer_type: ppo
max_steps: 500000
time_horizon: 128
summary_freq: 10000
keep_checkpoints: 5
hyperparameters:
batch_size: 64
buffer_size: 2024
learning_rate: 0.0003
learning_rate_schedule: linear
beta: 0.01
epsilon: 0.2
lambd: 0.95
num_epoch: 3
network_settings:
normalize: true
hidden_units: 256
num_layers: 1
vis_encode_type: simple
# 報酬
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
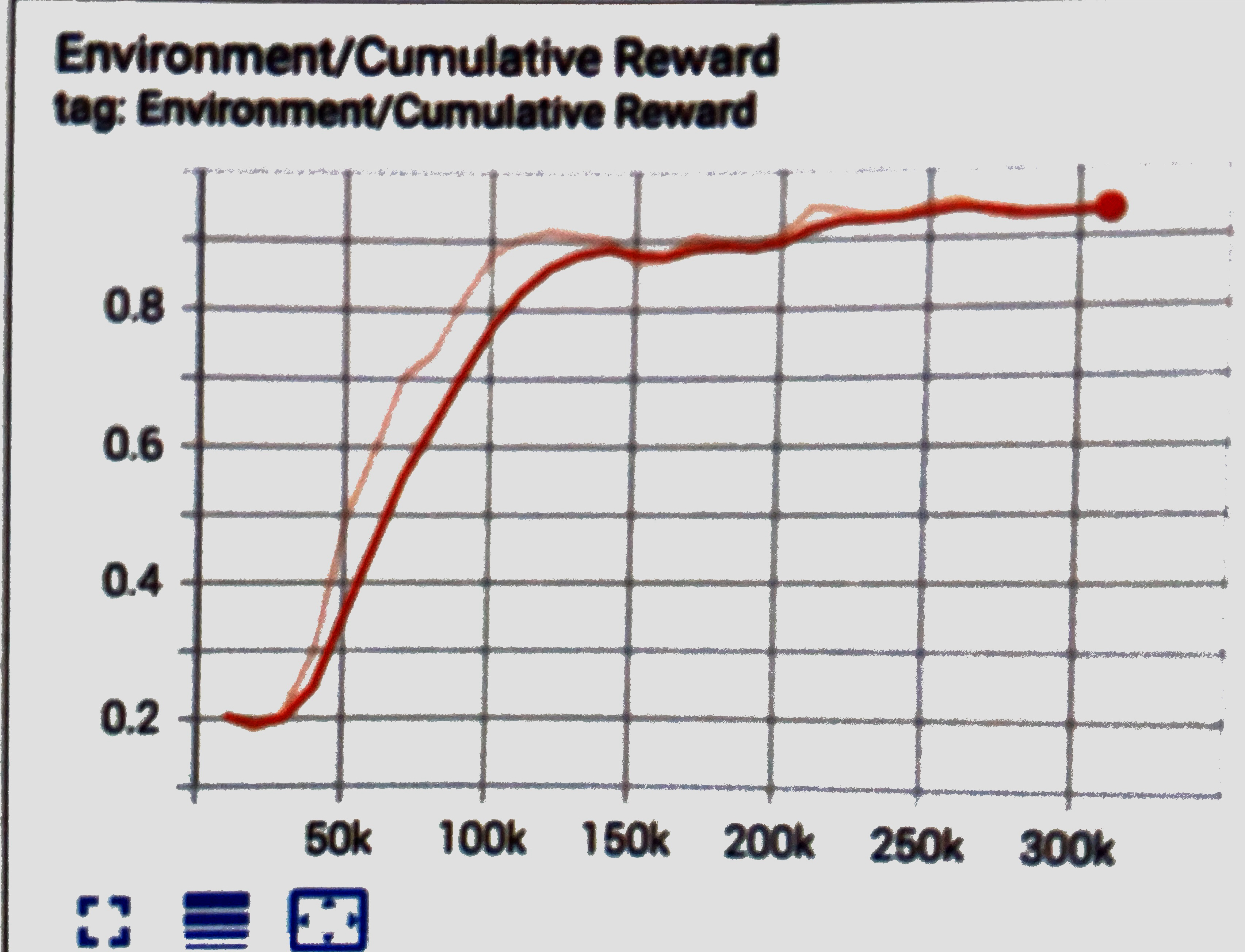
Visual Observationの学習の実行
mlagents-learn ./config/sample/VisualObservationEx.yaml --run-id=VisualObservationEx-1 --env=VisualObservationEx --num-envs=8
学習結果のグラフ例。220ステップで学習できています