Unity_Lesson
Discrete
すでに作成した学習環境「RollerBall」では、行動を「Continuous」として学習しましたが、これを「Discrete」にカスタマイズして学習させてみる
Discreteの学習環境の準備
「Discrete」は、離散値の要素を持つ整数配列
「行動」
・Discrete(サイズ1)
0:移動(0:なし,1:上移動,2:下移動,3:左移動,4:右移動)
(サンプル 4_2) 学習環境のカスタマイズの手順
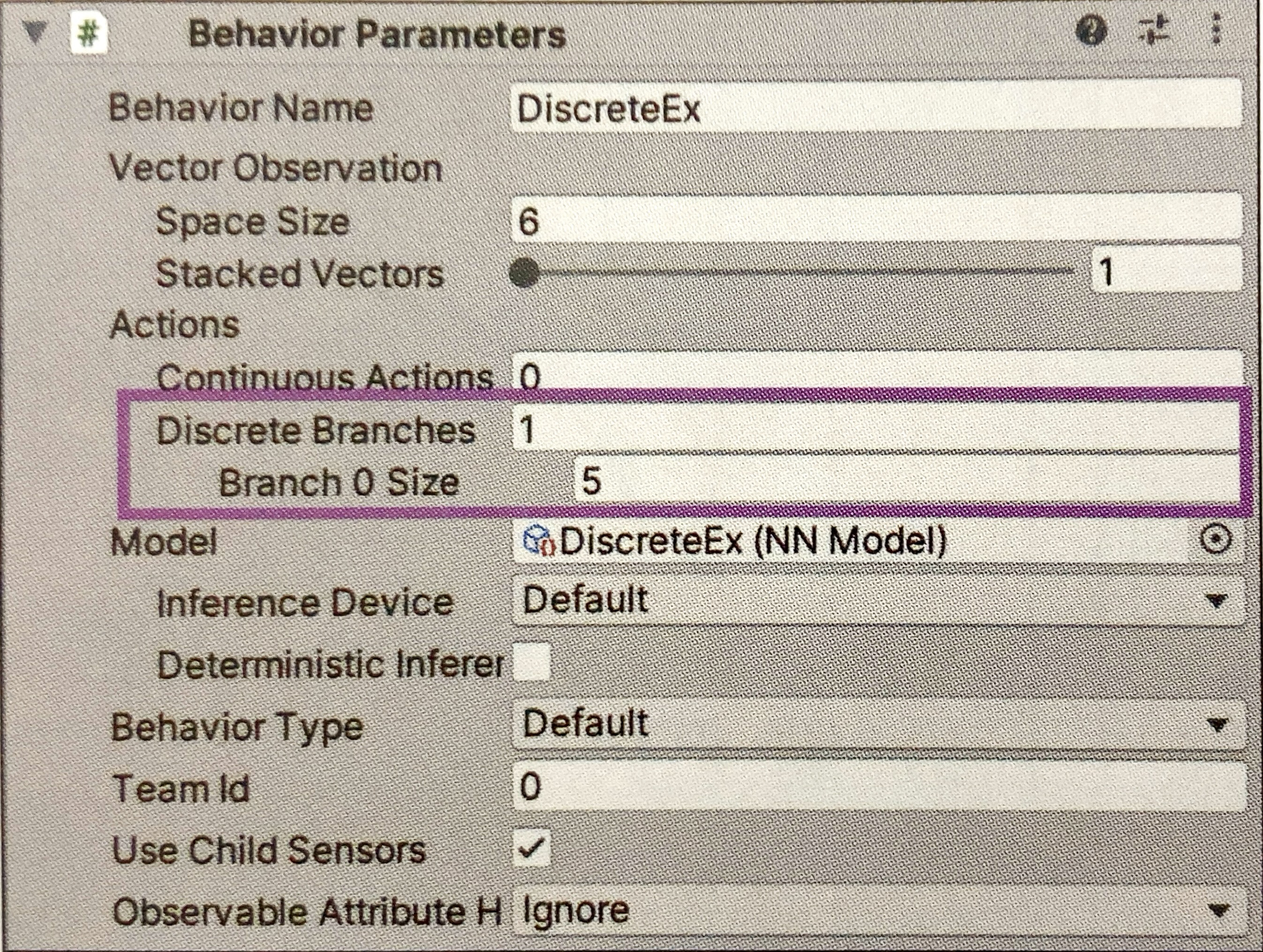
①「BehaviorParameters」を以下のように設定
Continuousな行動は利用しないのでサイズ「0」 Discreteな行動はサイズ「1」で値の範囲を5未満(0,1,2,3,4)とします
②スクリプト「RollerAgent.cs」のOnActionReceived()を以下のように変更
「RollerAgent.cs」の一部
// 行動実行時に呼ばれる
public override void OnActionReceived(ActionBuffers actionBuffers)
{
// RollerAgentに力を加える
Vector3 controlSignal = Vector3.zero;
int action = actionBuffers.DiscreteActions[0];
if (action == 1) controlSignal.z = 1.0f;
if (action == 2) controlSignal.z = -1.0f;
if (action == 3) controlSignal.x = -1.0f;
if (action == 4) controlSignal.x = 1.0f;
rBody.AddForce(controlSignal * 5);
(省略)
③スクリプト「RollerAgent.cs」のHeuristic()を以下のように変更
「RollerAgent.cs」の一部
// ヒューリスティックモードの行動決定時に呼ばれる
public override void Heuristic(in ActionBuffers actionBuffers)
{
var actionsOut = actionBuffers.DiscreteActions;
actionsOut[0] = 0;
if (Input.GetKey(KeyCode.UpArrow)) actionsOut[0] = 1;
if (Input.GetKey(KeyCode.DownArrow)) actionsOut[0] = 2;
if (Input.GetKey(KeyCode.LeftArrow)) actionsOut[0] = 3;
if (Input.GetKey(KeyCode.RightArrow)) actionsOut[0] = 4;
}
Discreteの学習設定ファイルの設定
behaviors:
DiscreteEx:
trainer_type: ppo
max_steps: 500000
time_horizon: 64
summary_freq: 1000
keep_checkpoints: 5
#学習アルゴリズム
hyperparameters:
#PPOとSAC共通
batch_size: 128
buffer_size: 2048
learning_rate: 0.0003
learning_rate_schedule: linear
#PPO用
beta: 0.005
epsilon: 0.2
lambd: 0.95
num_epoch: 3
# ニューラルネットワーク
network_settings:
normalize: false
hidden_units: 128
num_layers: 2
#報酬
reward_signals:
#環境報酬
extrinsic:
gamma: 0.99
strength: 1.0
「batch_size」「buffer_size」は、「Continuous」と「Discrete」で典型的な範囲が異なるので調整が必要になります
batch_size
- (典型的な範囲) Continuous + PPO : 512 ~ 5120
- (典型的な範囲) Continuous + SAC : 128 ~ 1024
- (典型的な範囲) Discrete : 32 ~ 512
buffer_size
- (典型的な範囲) PPO : 512 ~ 5120
- (典型的な範囲) SAC : 50000 ~ 1000000
Discreteの学習の実行
「Discrete」の学習を実行します。
mlagents-learn ./config/sample/DiscreteEx.yaml --run-id=DiscreteEx-1 --env=DiscreteEx --num-envs=8
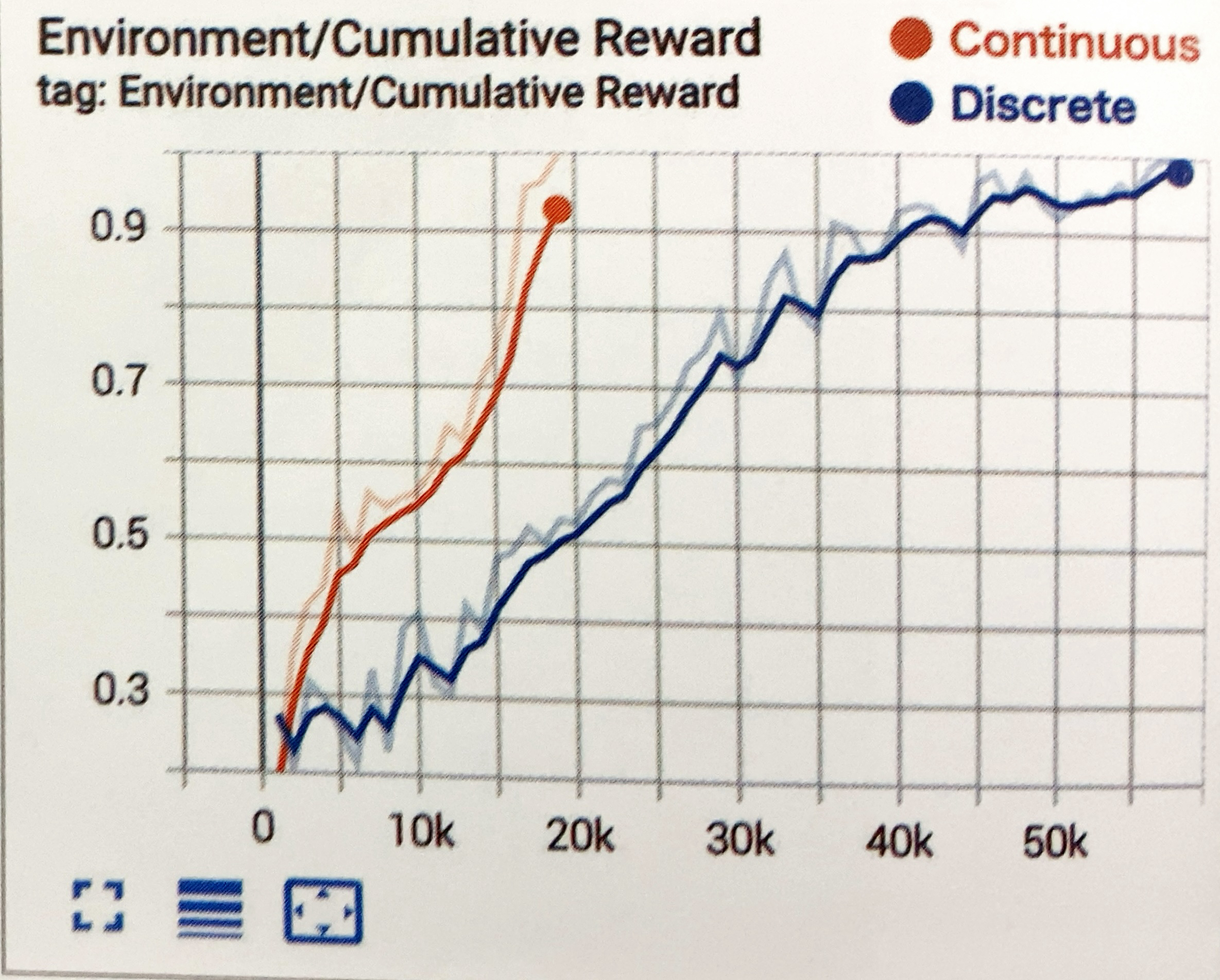
学習結果のグラフは次のとおりです。
50Kステップで学習できています。
今回は、「Continuous」の方が「Discrete」より速く収束していますが、多くの場合「Discrete」の方が速く収束します。