Unity_Lesson
SAC
SACとは
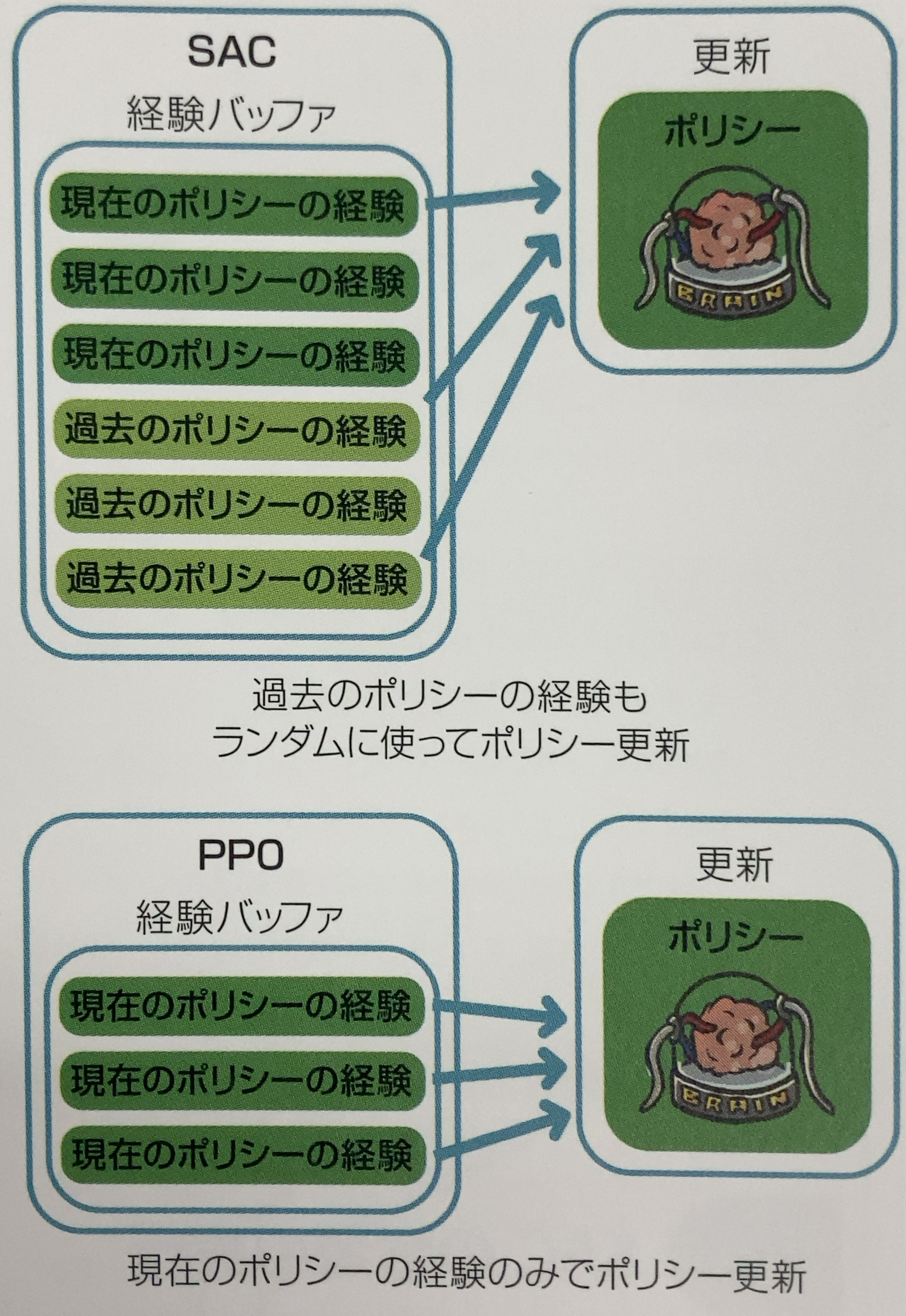
「SAC」(Soft Actor-Critic)は、過去の任意の時点で収集された経験から学ぶ「オフポリシー」な学習アルゴリズムです。
収集した経験を経験バッファに格納し、学習中にランダムに取り出して学習します。
「SAC」は「PPO」と比べて、過去のポリシーの経験を使い回す分、少ない経験数でたくさん学習できます。そのため、実世界のロボットなど、たくさんの経験の収集が難しい環境(学習の高速化やリセットが困難)でよく使われます。
Unity ML-Agentsでは、1ステップあたり約0.1秒以上かかる重い環境に適しています。
SACの学習環境の準備
学習環境「RollerBall」を「SAC」で学習してみましょう。(サンプル 4_1)
SACの学習設定ファイルの設定
今回は「SAC」で学習します。
以下のように、ハイパーパラメータを設定してください。「init_entcoef」は、学習開始時にエージェントがどの程度探索するか指定するハイパーパラメータです。 探索が多過ぎる場合は、この値を小さく調整します。
behaviors:
RollerBall:
# トレーナー種別
trainer_type: sac
# 基本
max_steps: 500000
time_horizon: 64
summary_freq: 1000
keep_checkpoints: 5
# 学習アルゴリズム
hyperparameters:
# PPOとSAC共通
batch_size: 64
buffer_size: 12000
learning_rate: 0.0003
learning_rate_schedule: constant
# SAC専用
buffer_init_steps: 0
tau: 0.005
steps_per_update: 10.0
save_replay_buffer: false
init_entcoef: 0.01
reward_signal_steps_per_update: 10.0
# ニューラルネットワーク
network_settings:
normalize: true
hidden_units: 128
num_layers: 2
# 報酬
reward_signals:
#環境報酬
extrinsic:
gamma: 0.99
strength: 1.0
SACの学習の実行
「SAC」の学習を実行します
mlagents-learn ./config/sample/SacEx.yaml --run-id=SacEx-1 --env=SacEx --num-envs=8
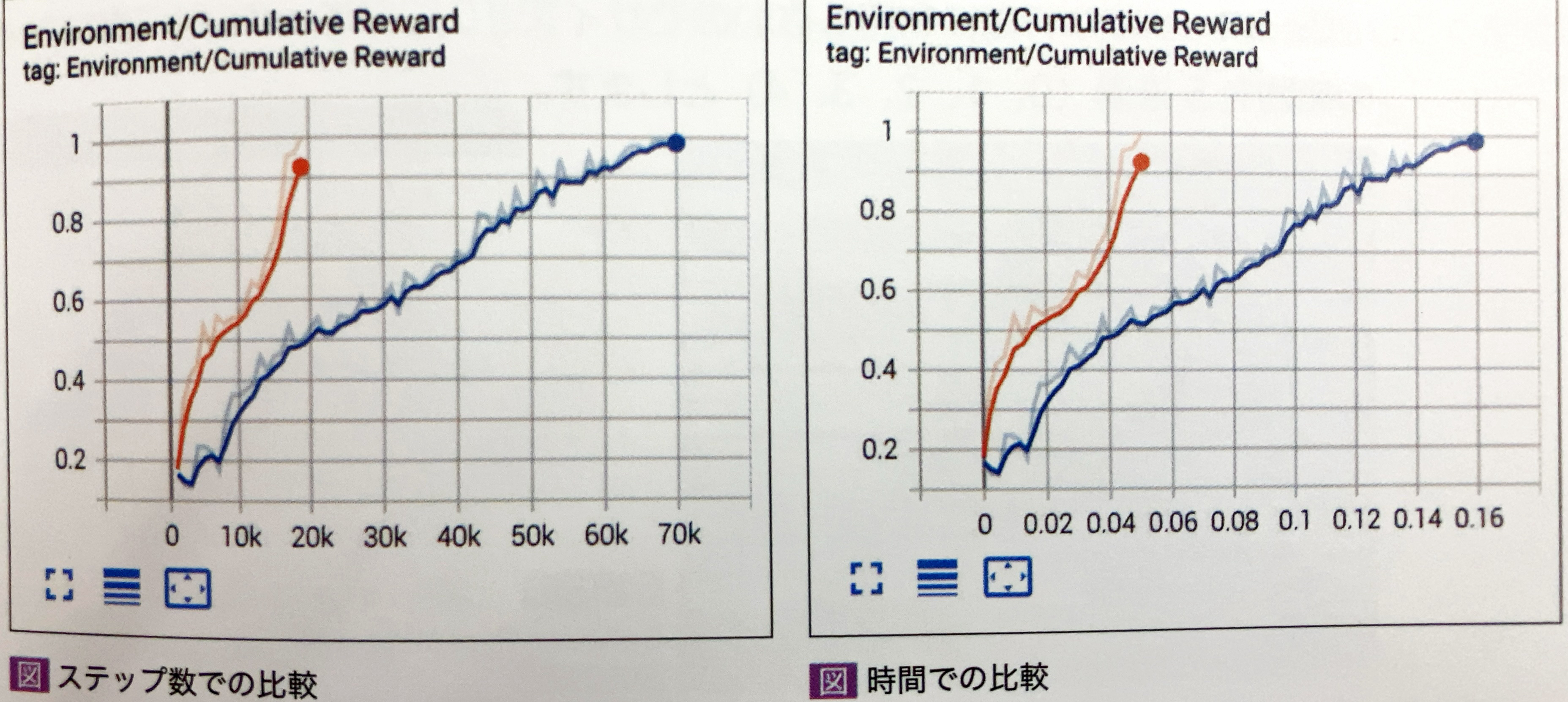
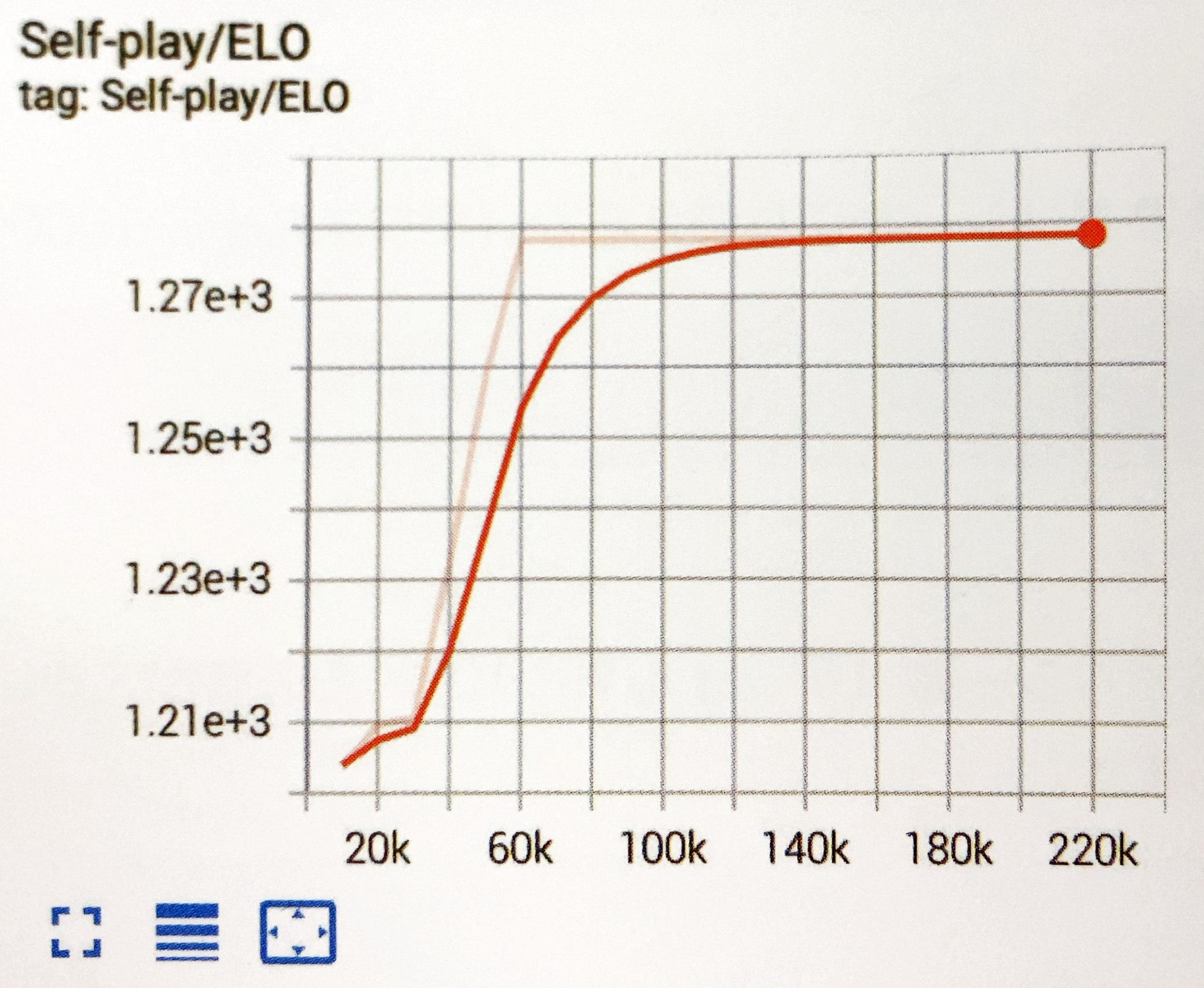
学習効果のグラフを見てください。
70Kステップで学習できているかと思います。 今回は、PPOの方がSACより速く収束していると思いますが、環境によってはSACの方が優れている場合もあります。
TensorBordのグラフで比較
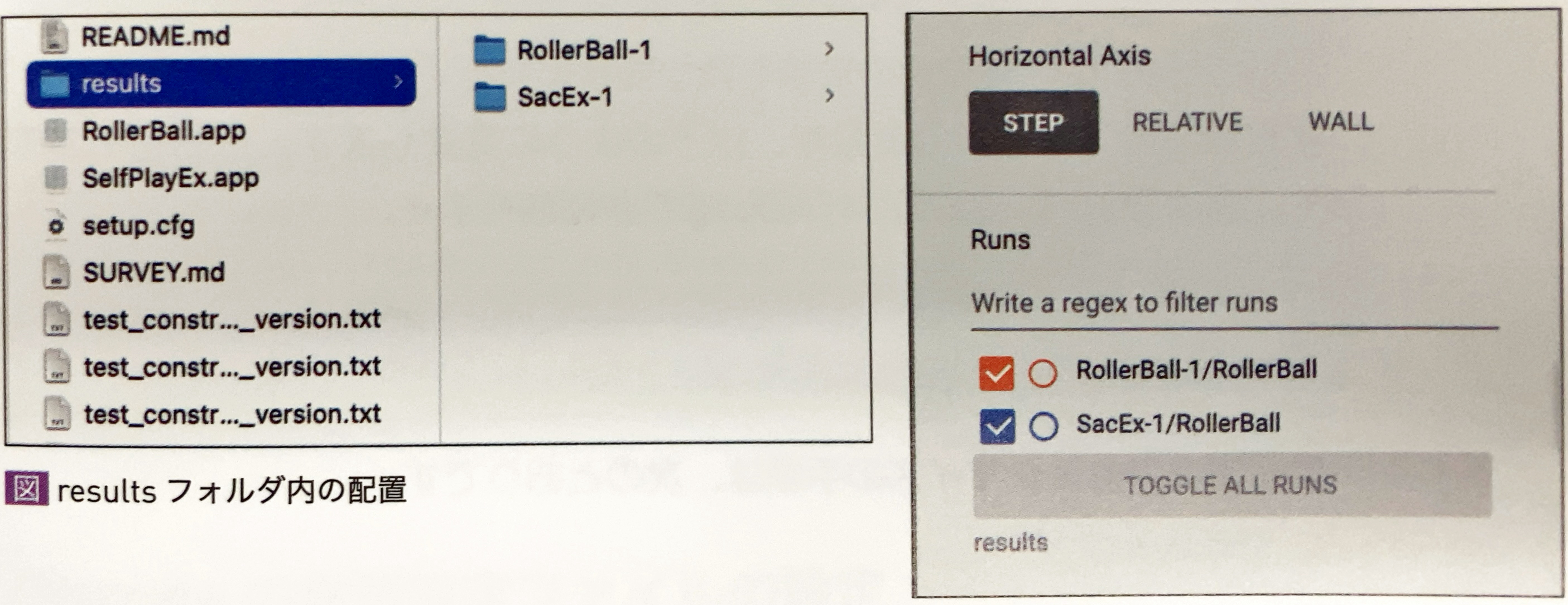
Tensorbordのグラフを比較するには、「results」フォルダに、比較したい学習結果フォルダを配置します。
そして、Tensorbordを起動します。
tensorboard --logdir=./results
「Runs」で比較したいグラフをチェックします。ステップ数で比較したい時は「STEP」、時間で比較したい時は「RELATIVE」を選択します。